

In reality, the analysis of this type of phenomenon does not differ much from that operated on artificial systems. It is almost trivial to realize that if system A sends a signal to system B, the only way that A possesses to “ascertain” that it has been received is by the transmission of an acknowledgment message by B; in other words, we are conscious of an action thanks to the perception of its interactions with the environment. If, for example, we move an arm, touch will alert us that the movement made has occurred in a given direction and has encountered certain obstacles, such as tissue resistance and the “barring” of the path due to external objects; in addition, there are endogenous stimuli (such as excessive lactic acid production) that can signal to the brain-through a sensation of pain-that a given movement is causing severe muscle stress and must therefore be stopped as soon as possible. Thus, The brain is continuously informed of the actual outcome of its orders and, in this way, can construct a mental map of its environment. The process in question is based on the feedback (feedback) of a message from the periphery back to the center. For this reason, it responds with information content based on the structural characteristics of the context in which the person interacts. In addition, the brain can integrate sensory data from different organs to obtain an optimal result, and, at the same time, it can dispense with one or more signals if conditions do not allow it.
For example, touch is often able to make up for the lack of sight: to fully realize this, it is enough to try walking in one’s house with eyes closed or during the night; what reaches the brain is minimal information about the characteristics of the various surfaces, but, thanks to the pre-stored cognitive map, it is sufficient to recognize a wall, a piece of furniture or the door of the kitchen, bathroom, etc. Without such perceptual feedback, it would not be accessible even to walk. It is, in fact, because of the continuous perspective variation-which the brain identifies and interprets-that we can understand the direction of movement and relative speed; in the absence of the visual signal, the only way to become aware of one’s progress is to refer to the organs of balance, which alert us to any imbalance. The other senses, particularly touch and hearing. If, for example, there is a carpet in a room, it is easy to be able to tell that you are walking upstairs by hearing only the timbral variation of the sound produced by the heels of your shoes or, if you do not have this information, by relying on the tactile signals produced by the soles of your feet, which still manage to grant us an awareness (at least in terms of difference) of where we are.
On the other hand, if the consciousness of action did not depend on perceptual feedback, how could we be sure that environmental constraints did not impede our will? Please think of the trivial situation of having to insert a key into a keyhole: no matter how precise the movement of your hand may be, the entire trajectory can’t be memorized for the simple reason that from time to time, the conditions in which you find yourself change (further forward, left, backward, etc.). Therefore, the brain must command the arm to make small movements by periodically calibrating both direction and speed based on visual and tactile perceptions; if you bump into the outline of the patch, you will immediately (and almost unconsciously) bring your arm back, move it slightly, and try again. Feedback thus ensures both accuracy and immunity to disturbances that may arise; it happens very often that as we are about to make a given movement, conditions change abruptly (think of having to get on an escalator or a streetcar that is leaving), forcing us to have to change the trajectory of individual elementary movements quickly. Without the help of feedback signals, it would be impossible to recognize the error, which does not depend on us in time to be able to remedy it; instead, thanks to feedback, anyone can self-synchronize with moving means without any difficulty.
To understand what is happening, let us refer to the figure below, where the pattern of a muscle closed in a feedback loop is depicted. R is the reference value we want the output Y to take; the circle represents a comparison node: it makes the difference (error) between the desired R-value and the actual Y value. This error is placed as input to the system (in our case, the muscle), which will respond (Y) with a contraction proportional to the command value. Suppose that for whatever reason (such as an unforeseen obstacle), the output Y is less than desired. The error e = R – Y will immediately grow, forcing the muscle to increase contraction and thus bringing Y back to the desired value. It is clear that equilibrium is reached when e = 0, i.e., when R = Y; it is immediately seen that any disturbing agents, although unforeseen and unknown, are nevertheless “shielded” independently by the feedback.
It should be pointed out, however, that the pattern shown above should be understood in a broad sense, i.e., the operations of taking the output Y and comparing it with R do not constantly occur in the same way; in fact, special phenomena may occur that, based on the actual (not the expected) outcome of an action, guide the agent toward a change in the reference. To clarify this point, let us take the example of a person walking in the dark down a corridor; if we assume that the goal is to reach a door located at the opposite end from the starting point, then any directional error detected from hitting a wall, should not force the will to increase muscle strength (as if one wanted to break through the wall), but rather to change the direction in the opposite direction to that which led to error and subsequently to correct the trajectory. In other words, perceptual feedback provides information whose use is:
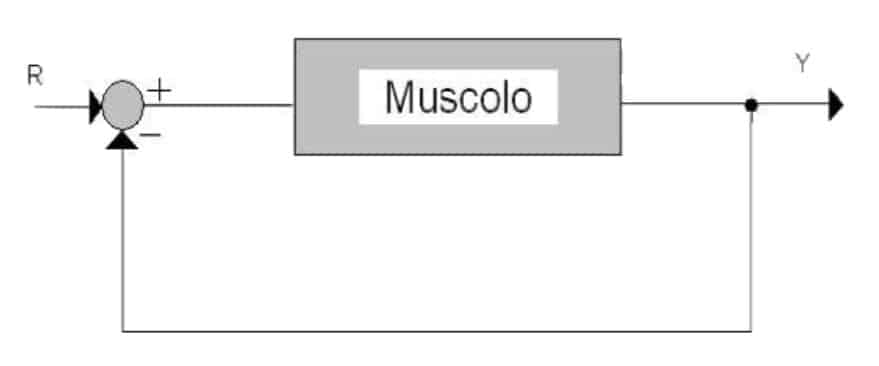
(“Muscolo” is the Italian for “Muscle”)
Closely related to the agent system and the context in which it is located: in some situations, such as when trying to unscrew the cap from a bottle, the increase in error must increase the value placed on the input to the system (in the case of a muscle it represents the force exerted), on the other hand whenever the goal is to avoid obstacles it is necessary for any error to guide the behavior toward finding an alternative solution that does not violate the integrity of the context.
In each case, feedback ensures behavior that is constrained to the context and actual response of the system so it provides information that the agent can correlate with its original orders; the pairs (order-response) thus obtained allow the conscious construction of a cognitive map that can be used when some sensory data are not available.
For example, suppose we are in a room in the dark. In that case, we can locate objects from the mental image we possess, supplemented by the information provided by touch, so if there are two tables of identical shape but different material (wood, glass), it is of no importance to know precisely the initial position to be able to identify near which structure we are, it is, in fact, sufficient to touch the surfaces and make a match in the pre-stored cognitive map. At this point, it is helpful to remember that the message conveyed by the senses is not always of the same type, or rather, the brain uses the data most appropriately for each circumstance: in one case, for example, touch may be used to find a wall or a door and thus its function is limited to assessing the compactness of the material, while in many situations a fine analysis of the response is necessary, such as when it comes to having to identify a piece of clothing from the type of fabric.
It is precisely in these situations that knowing the difference between the desired and the actual response is of paramount importance, but there are cases in which such information is vital to an individual’s survival; think of an animal eating the food scattered throughout its habitat, we can imagine the search as a retroactive process: the goal is to find food that meets the criteria of goodness imposed through taste analysis (e.g., a plant with a given taste may be rejected because it is not good enough to be eaten) or smell. A plant with a given flavor may be discarded because it has proven harmful on previous occasions) or smell, it proceeds as long as the error is high (no suitable food) and stops when the criteria are found to be met. If we did not refer to feedback, there would be no way to explain why an animal, after tasting a food, decides to reject it: the reason is that it is not adequate for the desired response. Therefore, the system (the locomotion apparatus) is prompted to continue the search.
An exciting aspect of evolved beings’ behavior is the ability to integrate different sources of information to obtain a perceptual result as close to reality as possible. In very young children, this mechanism is still in its primordial stage, and it often happens to witness scenes of uncertainty due precisely to the contrast between two different messages coming from as many sensory apparatuses; the example of the little child who, after experiencing the pain caused by a slight fall, remains stuck when placed on a table with a transparent part, he is invited is now classic:
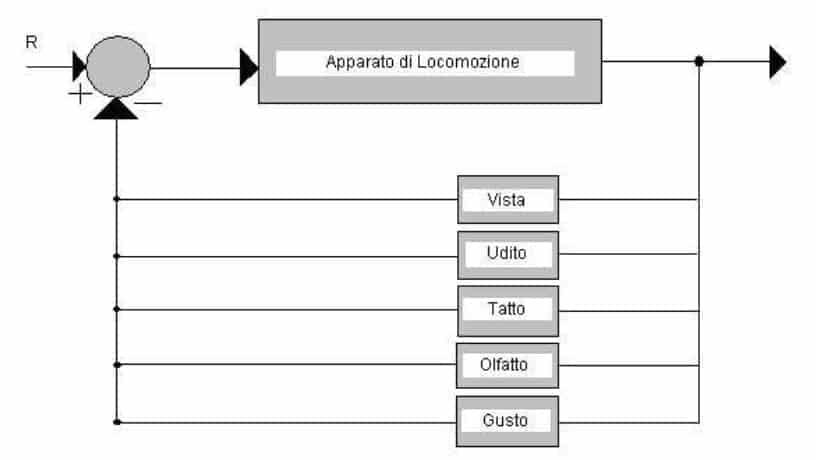
(“Apparato di Locomozione” stands for “Locomotion system,” while “Vista, Udito, Tatto, Olfatto, and Gusto” stand for “Sight, Hearing, Touch, Smell, and Taste”)
To go through it. The process that controls the child’s walking is based on the feedback of visual information regarding the ground: if he notices that there is a margin beyond which he does not see a compact material, the experience gained forces him to stop and not to continue; in practice, in his brain, it is as if a rule is implemented such as, “Walk looking at the ground if you see the void does not go forward because the consequence is severe pain.”
Of course, if the child were perfectly capable of operating a complete integration of sensory information, he would have no qualms about continuing on his way since, even if sight signals danger, touch could still enable him to ascertain the material’s resistance; however, as we have seen, in the absence of specific data the brain always adopts the solution most compatible with the cognitive map related to that particular context, on the other hand, this should not be too surprising since there are cases in which anyone could find himself in a situation of “perceptual stalemate.”
Let’s think of a simple virtual experiment: in a vast room, several perfectly polished glass panes are placed, and the lighting is designed to ensure the absence of glare and shadows. Now if a person is asked to walk freely within the room after being duly informed of the presence of the almost invisible obstacles, it would not at all surprise to see him or her move with extreme caution and arms stretched forward since the only way to avoid collision with a pane is to locate its position using touch.
Moreover, it would make no difference if the person were blindfolded; on the contrary, taking into account that vision could produce misleading information, it is good to have it completely removed from the locomotion control process; in other words, referring to the above-referenced figure, when a branch related to a particular sense does not provide noise-free data, it is good to have it excluded. The schematic shows a locomotion control process where all five sensory signals are retroacted (it is implied that the comparison is always made separately and criterionally differently).
What we stated earlier about integrating the different information sources should be considered a “sum” of the different contributions; consequently, if one of the members is absent, this does not substantially affect the result.
At most, as in the case of the child, feedback can curb processes that would not lead to real errors, but this is part of the preventive strategy to preserve the agent’s integrity.
Finally, I would like to point out that, in my opinion, the concept of consciousness of action is nothing more than the very result of perceptual feedback: any electromechanical device is capable of driving a motor, causing, for example, the movement of a rod, but this process, according to most cognitivist psychologists and philosophers of the mind, can never be the cause of what we humans call consciousness.
However, how we command our muscles does not differ more than a little from the actuation mechanisms of a robot. Yet, any person would not hesitate to say that she is conscious of a certain movement intended by her will.
What’s more, even if direct control by the individual were to be “exempted” to cause a muscle to contract-as artificially is the case with medical electrostimulators-the certainty of the action would still be preserved; the reason for this must be sought in the feedback signals produced mainly by touch, but also partially by sight and hearing.
If I move my leg, all the tactile sensors that are in contact with any surface (including, in a broad sense, even air) are excited and convey to the brain an enormous amount of information; it is precisely this information that allows the formation of a conscious idea of movement that would otherwise remain completely unknown.
An exciting particular case is the optical lubrication movement operated by the eyelids: the only way to become aware of it is by visual observation; in fact, none of us can perceive a hypothetical tactile signal of creeping, although this may seem absurd, for me it is entirely useless to classify this phenomenon as “unconscious” since, although not produced by the will-except when we decide to close our eyes-it is still possible to become aware of it through visual signals.
In this sense, the concept of consciousness comes to take on a broader but, at the same time, much more rigorous meaning in that we associate the feeling of awareness with one or more feedback signals that reach the brain after it has ordered a particular action.
Of course, the meaning we propose is based on the interaction of the agent with a definite context, and thus, not all the possibilities brought forward by the proponents of innatism are covered; besides, I do not think it is possible from a gnoseological point of view to treat consciousness without premising interaction with at least a knowing subject, so I suppose our way of understanding this concept is acceptable and certainly more easily accessible than definitions based on an approach too far removed from scientific experimental methods.
Bibliographical references
-
- Neisser U., Conoscenza e Realtà, Il Mulino
- Isidori A., Sistemi di Controllo, Siderea
- Von Neumann J. Et alt., La Filosofia degli Automi, Boringhieri
- Bonaccorso G., La Percezione Ciclica, Saggi su IA e Filosofia della Mente (2004-2005)