

In realtà l’analisi di questo tipo di fenomeni non si discosta molto da quella operata su sistemi artificiali ed è quasi banale rendersi conto che se il sistema A manda un segnale al sistema B, l’unico modo che A possiede per “accertarsi” dell’avvenuta ricezione è la trasmissione di un messaggio di conferma da parte di B; in altre parole, noi siamo coscienti di un’azione grazie alla percezione delle interazioni della stessa con l’ambiente. Se ad esempio muoviamo un braccio, il tatto ci avvertirà che il movimento compiuto è avvenuto in una data direzione e ha incontrato alcuni ostacoli, come la resistenza dei tessuti e lo “sbarramento” del cammino a causa di oggetti esterni; inoltre esistono stimoli endogeni (come l’eccessiva produzione di acido lattico) che sono in grado di segnalare al cervello – grazie ad una sensazione di dolore – che un dato movimento sta causando un forte stress muscolare e deve quindi essere interrotto al più presto. Il cervello viene quindi continuamente informato del risultato reale dei suoi ordini ed in questo modo è in grado di costruire una mappa mentale dell’ambiente in cui si trova. Il processo in questione è basato sulla retroazione (feedback) di un messaggio che dalla periferia torna verso il centro e per questa ragione fornisce una risposta che ha un contenuto informativo basato sulle caratteristiche strutturali del contesto in cui la persona si trova ad interagire, oltre tutto il cervello è capace di integrare dati sensoriali provenienti da organi differenti in modo da ottenere un risultato ottimale e, allo stesso tempo, può fare a meno di uno o più segnali qualora le condizioni non li permettano.
Ad esempio il tatto è spesso in grado di sopperire alla mancanza della vista: per rendersene pienamente conto basta provare a camminare nella propria casa ad occhi chiusi o durante la notte, ciò che giunge al cervello è un informazione molto limitata sulle caratteristiche delle varie superfici, ma, grazie alla mappa cognitiva pre- immagazzinata, essa è sufficiente per riconoscere una parete, un mobile o la porta della cucina, del bagno, ecc. Senza tale feedback percettivo sarebbe veramente difficile anche il solo camminare, è infatti a causa della continua variazione prospettiva – che il cervello identifica ed interpreta – che noi riusciamo a capire la direzione del movimento e la velocità relativa; in assenza del segnale visivo l’unico modo per rendersi conto del proprio avanzare è quello di fare riferimento agli organi dell’equilibrio, che ci segnalano eventuali sbilanciamenti, e agli altri sensi, in particolare il tatto e l’udito. Se, ad esempio, in un locale si trova un tappeto è facile riuscire a capire che si sta camminando di sopra udendo solo la variazione timbrica del suono prodotto dai tacchi delle scarpe o, qualora non si disponga di questa informazione, affidandosi ai segnali tattili prodotti dalla pianta del piede, i quali riescono comunque a garantirci la consapevolezza (perlomeno in termini di differenza) di dove ci troviamo.
D’altronde se la coscienza di un’azione non dipendesse da un feedback percettivo come si potrebbe essere certi che i vincoli ambientali non abbiano ostacolato la nostra volontà ? Pensate alla banale situazione di dover inserire una chiave in una toppa: per quanto preciso possa essere il movimento della vostra mano, è impossibile che l’intera traiettoria possa essere memorizzata per la semplice ragione che di volta in volta cambiano le condizioni in cui vi trovate (più avanti, a sinistra, indietro, ecc.). Perciò è necessario che il cervello ordini al braccio di compiere piccoli spostamenti calibrando periodicamente sia la direzione che la velocità sulla base delle percezioni visive e tattili; se urtate il contorno della toppa, immediatamente (e quasi inconsciamente) porterete il braccio indietro, lo sposterete leggermente e riproverete. Il feedback garantisce dunque sia la precisione che l’immunità ai disturbi che si possono presentare, capita molto spesso, infatti, che mentre ci accingiamo a compiere un dato movimento, le condizioni varino bruscamente (pensate a dover salire su una scala mobile o su un tram che sta partendo) costringendoci a dover cambiare celermente la traiettoria dei singoli movimenti elementari. Senza l’ausilio dei segnali di ritorno sarebbe impossibile riconoscere l’errore – che non dipende da noi – in tempo per poter rimediare, invece grazie alla retroazione chiunque è capace di auto-sincronizzarsi con mezzi in movimento senza alcuna difficoltà.
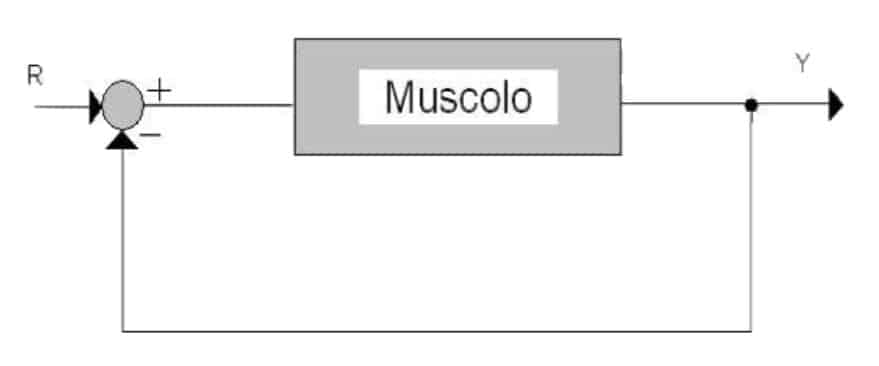
Per capire in pratica ciò che accade facciamo riferimento alla figura sotto riportata, in essa è rappresentato lo schema di un muscolo chiuso in un anello di retroazione. R è il valore di riferimento che vogliamo far assumere all’uscita Y; il cerchietto rappresenta un nodo di confronto: esso effettua la differenza (errore) tra il valore R desiderato e quello effettivo Y. Tale errore è posto in ingresso al sistema (nel nostro caso il muscolo) che risponderà (Y) con una contrazione proporzionale al valore di comando. Adesso supponiamo che per una ragione qualsiasi (ad esempio un ostacolo imprevisto) l’uscita Y risulti minore di quella desiderata, l’errore e = R – Y crescerà immediatamente forzando il muscolo ad aumentare la contrazione e quindi riportando Y al valore desiderato. E’ chiaro che l’equilibrio viene raggiunto quando e = 0, cioè quando R = Y; si vede immediatamente che gli eventuali agenti disturbanti, pur essendo imprevisti e sconosciuti, vengono comunque “schermati” autonomamente dal feedback.
E’ bene tuttavia precisare che lo schema sopra mostrato deve essere inteso in senso lato, ovvero le operazioni di prelievo dell’uscita Y e il confronto con R non avvengono sempre allo stesso modo, possono infatti avvenire fenomeni particolari che, sulla base del risultato reale (non quello previsto) di un’azione, guidano l’agente verso un cambio del riferimento. Per chiarire questo punto facciamo l’esempio di una persona che cammina al buio lungo un corridoio, se supponiamo che l’obiettivo sia quello di raggiungere una porta situata all’estremo opposto al punto di partenza, allora un eventuale errore di direzione, rilevato a partire dall’urto contro una parete, non deve forzare la volontà ad aumentare la forza muscolare (come se si volesse sfondare la parete), ma piuttosto a cambiare la direzione nel verso opposto a quella che ha condotto ad errore e successivamente a correggere la traiettoria. In altre parole, il feedback percettivo fornisce un’informazione il cui utilizzo è:
strettamente correlato con il sistema agente e il contesto in cui esso si trova: in talune situazioni, come per esempio quando si cerca di svitare il tappo da una bottiglia, l’aumento dell’errore deve tradursi in un aumento del valore posto in ingresso al sistema (nel caso di un muscolo esso rappresenta la forza esercitata), invece ogniqualvolta l’obiettivo è quello di evitare gli ostacoli è necessario che l’eventuale errore guidi il comportamento verso la ricerca di una soluzione alternativa che non violi l’integrità del contesto.
In ogni caso il feedback garantisce un comportamento che è vincolato al contesto e alla risposta reale del sistema quindi fornisce un’informazione che l’agente è in grado di correlare con i suoi ordini originali; le coppie (ordine – risposta) così ottenute permettono la costruzione cosciente di una mappa cognitiva che può essere utilizzata quando alcuni dati sensoriali non sono disponibili.
Ad esempio, se ci troviamo in una stanza al buio noi siamo in grado di localizzare gli oggetti a partire dall’immagine mentale che possediamo, integrata dalle informazioni che ci fornisce il tatto, così, se ci sono due tavoli di identica forma ma di differente materiale (legno, vetro) non ha alcuna importanza conoscere esattamente la posizione iniziale per poter identificare vicino a quale struttura ci troviamo, è infatti sufficiente toccare le superfici ed effettuare un riscontro nella mappa cognitiva pre-immagazzinata. A questo punto è utile ricordare che il messaggio trasmesso dai sensi non è sempre dello stesso tipo, o meglio, il cervello utilizza i dati nel modo più appropriato ad ogni circostanza: in un caso, ad esempio, il tatto può servire per trovare una parete o una porta e quindi la sua funzione è limitata alla valutazione della compattezza del materiale, mentre in molte situazioni è necessaria un’analisi fine della risposta, come quando si tratta di dover identificare un capo d’abbigliamento a partire dal tipo di tessuto.
Proprio in queste situazioni conoscere la differenza tra la risposta desiderata e quella reale è di fondamentale importanza, ma esistono casi in cui tale informazione è vitale per la sopravvivenza di un individuo; pensate ad un animale che mangia il cibo sparso nel suo habitat, possiamo immaginare la ricerca come un processo retroazionato: l’obiettivo è quello di trovare cibo che soddisfa i criteri di bontà imposti attraverso l’analisi del gusto (ad es. una pianta con un dato sapore può essere scartata perché in precedenti occasioni si è rivelata nociva) e/o dell’olfatto, essa procede finché l’errore è alto (non c’è cibo adeguato) e si ferma quando i criteri risultano soddisfatti. Se non si facesse riferimento al feedback non ci sarebbe modo di spiegare perché un animale, dopo aver assaggiato un cibo, decida di rifiutarlo: il motivo è che esso non è adeguato alla risposta desiderata e perciò il sistema (in questo caso l’apparato di locomozione) viene sollecitato per proseguire la ricerca.
Un aspetto molto interessante del comportamento degli esseri evoluti è proprio la capacità di integrare diverse fonti di informazioni al fine di ottenere un risultato percettivo quanto più prossimo alla realtà. Nei bambini molto piccoli questo meccanismo è ancora in fase primordiale e spesso capita di assistere a scene di incertezza dovute proprio al contrasto tra due diversi messaggi provenienti da altrettanti apparati sensoriali; è ormai classico l’esempio del bambino piccolo che, dopo aver sperimentato il dolore provocato da una piccola caduta, rimane bloccato quando, posto su un tavolo con una parte trasparente, viene invitato:
ad attraversarlo. Evidentemente il processo che controlla la deambulazione del bambino è basato sul feedback dell’informazione visiva riguardante il suolo: se egli si accorge che esiste un margine oltre il quale non vede un materiale apparentemente compatto, l’esperienza acquisita lo costringe a fermarsi e a non proseguire; in pratica nel suo cervello è come se venisse attuata una regola del tipo: « Cammina guardando a terra, se vedi il vuoto non andare avanti perché la conseguenza è un forte dolore ».
Naturalmente se il bambino fosse perfettamente in grado di operare un’integrazione completa delle informazioni sensoriali non avrebbe alcun timore a proseguire il suo cammino, in quanto, anche se la vista segnala un pericolo, il tatto gli potrebbe comunque permettere di accertarsi della resistenza del materiale; tuttavia, come abbiamo visto, in assenza di dati certi il cervello adotta sempre la soluzione più compatibile con la mappa cognitiva relativa a quel determinato contesto, d’altronde ciò non deve stupire più di tanto poiché esistono casi in cui chiunque potrebbe trovarsi in una situazione di “stallo percettivo”.
Pensiamo ad semplice esperimento virtuale: in una stanza molto grande vengono poste alcune lastre di vetro perfettamente lucidate e l’illuminazione è studiata in modo da garantire l’assenza di riverberi e ombre, adesso se si chiede ad una persona di camminare liberamente all’interno del locale dopo averla debitamente informata della presenza degli ostacoli quasi invisibili, non stupirebbe affatto vederla muoversi con estrema cautela e le braccia protese in avanti poiché l’unico modo di evitare la collisione con una lastra è quello di localizzarne la posizione utilizzando il tatto.
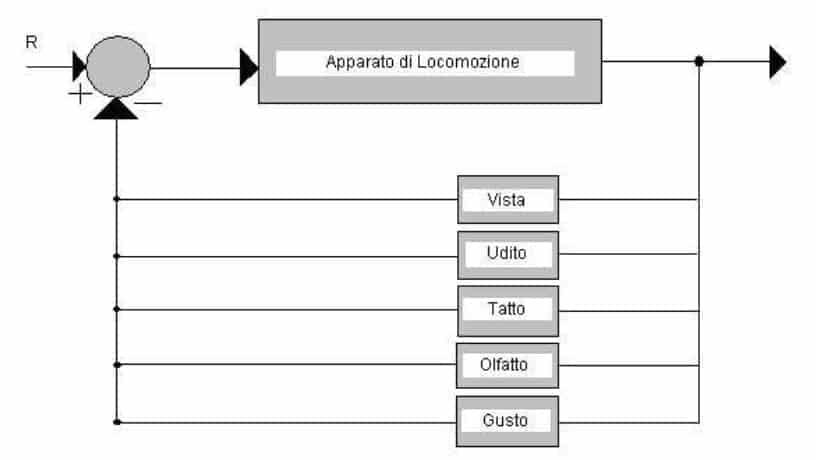
Inoltre non farebbe alcuna differenza se la persona fosse bendata, anzi, tenuto conto che la vista potrebbe produrre informazioni fuorvianti, è bene che essa venga del tutto estraniata dal processo di controllo della locomozione; in altre parole, rifacendoci alla figura sopra-riportata, quando un ramo relativo ad un determinato senso non fornisce dati privi di rumore è bene che venga estromesso. Nello schema è mostrato un processo di controllo della locomozione dove vengono retroazionati tutti e cinque i segnali sensoriali; (è sottinteso che il confronto viene sempre effettuato separatamente e criterialmente in modo differente).
Ciò che abbiamo prima affermato riguardo all’integrazione delle diverse sorgenti informative lo si deve pensare come una “somma” dei diversi contributi, di conseguenza se uno dei membri è assente, ciò non pregiudica in modo sostanziale il risultato.
Tutt’al più, come nel caso del bambino, il feedback può frenare processi che non condurrebbero ad errori reali, ma ciò rientra nella strategia preventiva che ha come scopo quello di preservare l’integrità dell’agente.
Infine vorrei precisare che, a mio parere, il concetto di coscienza di un’azione, non è altro che il frutto proprio del feedback percettivo: qualsiasi dispositivo elettromeccanico è in grado di azionare un motore, provocando ad esempio il movimento di un’asta, ma questo processo, secondo la maggior parte degli psicologi cognitivisti e dei filosofi della mente, non può mai essere causa di quello che noi esseri umani chiamiamo coscienza.
Tuttavia il nostro modo di comandare i muscoli non differisce più di tanto dai meccanismi di attuazione di un robot, eppure qualsiasi persona non esiterebbe nel dire che ella è cosciente di un determinato movimento voluto dalla sua volontà.
Oltretutto, anche qualora si “esonerasse” il controllo diretto da parte dell’individuo per provocare artificialmente la contrazione di un muscolo – come accade con gli elettrostimolatori medicali –, la certezza dell’azione verrebbe comunque preservata; il motivo di ciò va cercato nei segnali di ritorno prodotti principalmente dal tatto, ma anche parzialmente dalla vista e dall’udito.
Se io muovo la mia gamba, tutti i sensori tattili che si trovano a contatto con qualsiasi superfice (compresa in senso lato anche l’aria) vengono eccitati e convogliano verso il cervello un’enorme quantità di informazioni; sono proprio queste ultime a permettere la formazione di un’idea cosciente del movimento che altrimenti resterebbe del tutto ignoto.
Un caso particolare molto interessante è il movimento di lubrificazione ottica operato dalle palpebre: l’unico modo per venirne a conoscenza è l’osservazione visiva, nessuno di noi è infatti in grado di percepire un ipotetico segnale tattile di strisciamento; anche se ciò può sembrare assurdo, per me è del tutto inutile classificare questo fenomeno come “incosciente” poichè, seppur non prodotto dalla volontà – tranne quando si decide di chiudere gli occhi –, è comunque possibile accorgersi di esso attraverso i segnali visivi.
In questo senso il concetto di coscienza viene ad assumere un significato più vasto ma nel contempo molto più rigoroso in quanto si associa la sensazione di consapevolezza ad uno o più segnali di ritorno che giungono al cervello dopo che questi ha ordinato un’azione particolare.
Naturalmente l’accezione da noi proposta è basata sull’interazione dell’agente con un preciso contesto e quindi non sono contemplate tutte le possibilità portate avanti dai sostenitori dell’innatismo; d’altronde non credo sia possibile da un punto di vista gnoseologico trattare la coscienza senza premettere l’interazione almeno con un soggetto conoscente, quindi suppongo che il nostro modo di intendere tale concetto sia accettabile e certamente più facilmente accessibile rispetto a definizioni fondate su un approccio troppo distante dai metodi sperimentali scientifici.
Riferimenti bibliografici
-
- Neisser U., Conoscenza e Realtà, Il Mulino
- Isidori A., Sistemi di Controllo, Siderea
- Von Neumann J. Et alt., La Filosofia degli Automi, Boringhieri
- Bonaccorso G., La Percezione Ciclica, Saggi su IA e Filosofia della Mente (2004-2005)